01
Background
This is some of the examples of laboratory experience in my fifth Robotics Engineering Course: RBE 3002 - Unified Robotics IV: Navigation, Mapping, and Planning.
"RBE 3002 is the fourth class of the four-course unified robotics sequence introducing foundational theory and practice of robotics engineering from the fields of computer science, electrical engineer-ing and mechanical engineering.The focus of this course is navigation, position estimation and communications. Concepts of dead reckoning, landmark updates, inertial sensors, and radio location will be explored. Control systems as applied to navigation will be presented. Communication, remote control and remote sensing for mobile robots and tele-robotic systems will be introduced. Wireless communications including wireless networks and typical local and wide area networking protocols will be discussed. Considerations will be discussed regarding operation in difficult environments such as underwater, aerospace, hazardous, etc. Laboratory sessions will be directed towards the solution of an open-ended problem over the course of the entire term."
02
Photos
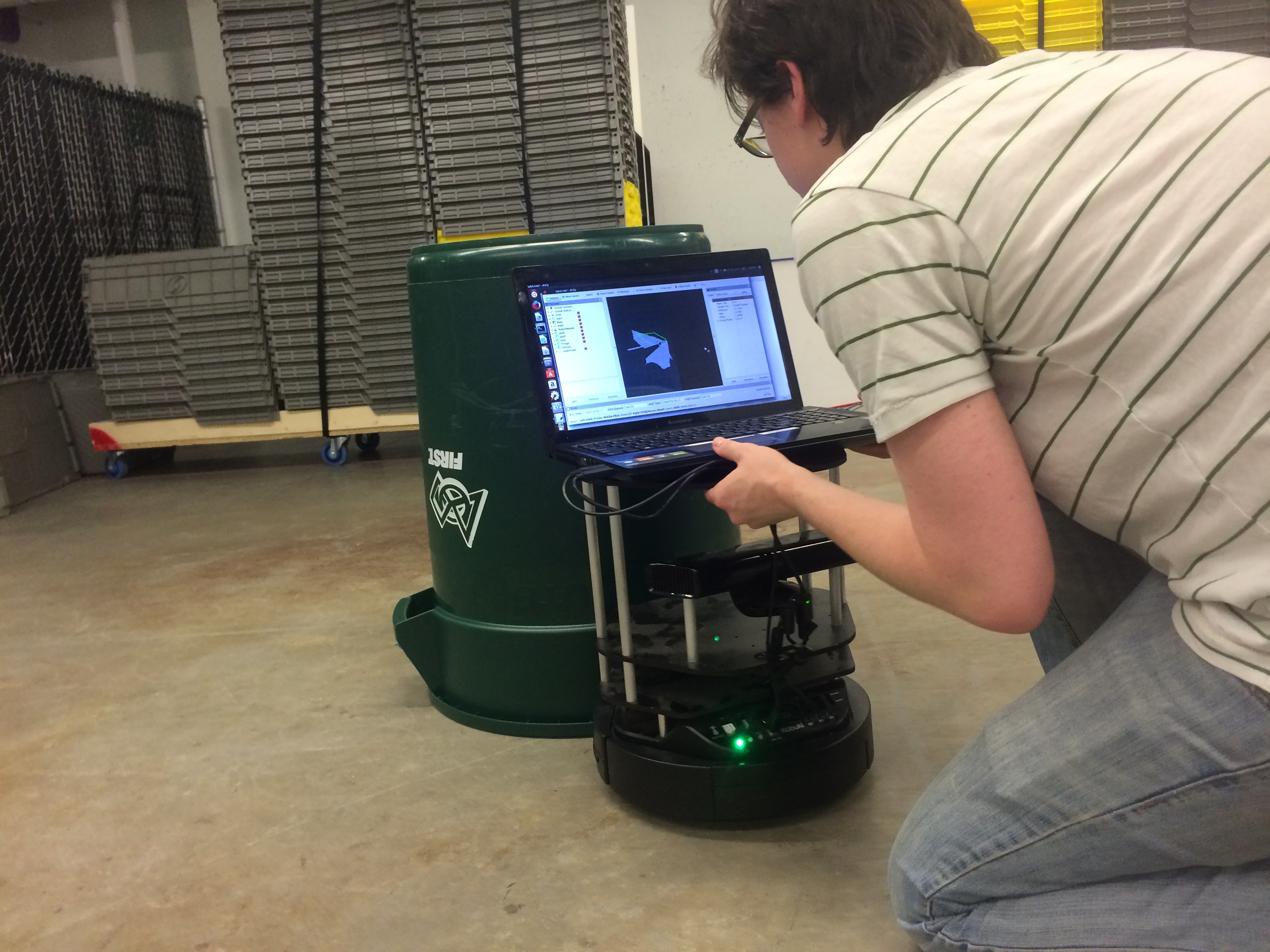
The platform of this course was using the Turtlebot seen here. It is a Ubuntu 14.04 Laptop running Robot Operating System (ROS) on a Roomba Base with Xbox Kinect Vision.

The platform of this course was using the Turtlebot seen here. It is a Ubuntu 14.04 Laptop running Robot Operating System (ROS) on a Roomba Base with Xbox Kinect Vision.
Showing Occupancy Grid, where Black is showing a definite object. The green is a "buffer zone" where we expand the known obstacles to avoid. Gray spaces are open and navigable.
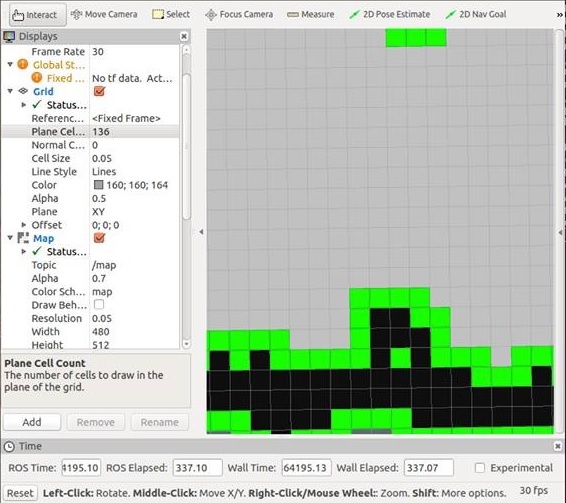
Showing Occupancy Grid, where Black is showing a definite object. The green is a "buffer zone" where we expand the known obstacles to avoid. Gray spaces are open and navigable.
Here occupancy grid is expanded to at least 2-squares away from all known obstacles.
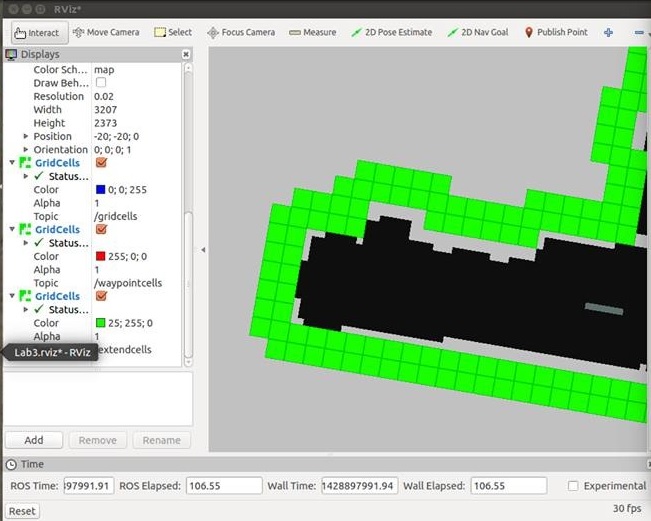
Here occupancy grid is expanded to at least 2-squares away from all known obstacles.
One of my team members, Beth Martino, programming the laptop in the field. The room to be navigated has 3-fold Poster boards to create an abstract room. This tests our ability to navigate as opposed to doing a traditional square or anything.

One of my team members, Beth Martino, programming the laptop in the field. The room to be navigated has 3-fold Poster boards to create an abstract room. This tests our ability to navigate as opposed to doing a traditional square or anything.
My other team member, Will Manning, observing the Turtlebot's Vision in front of a known obstacle.
My other team member, Will Manning, observing the Turtlebot's Vision in front of a known obstacle.
Panoramic shot of WPI's Robot Pits including the room we were working in.

Panoramic shot of WPI's Robot Pits including the room we were working in.