01
Background
This is some of the examples of laboratory experience in my fourth Robotics Engineering Course: RBE 3002 - Unified Robotics IV: Navigation, Mapping, and Planning.
"This is the third of the four-course Unified Robotics sequence introducing foundational theory and practice of robotics engineering from the fields of computer science, electrical engineering and mechanical engineering. The focus of this course is actuator design, embedded computing and complex response processes. Concepts of dynamic response as relates to vibration and motion planning will be presented. The principles of operation and interface methods various actuators will be discussed, including pneumatic, magnetic, piezoelectric, linear, stepper, etc. Complex feedback mechanisms will be implemented using software executing in an embedded system. The necessary concepts for real-time processor programming, re-entrant code and interrupt signaling will be introduced. Laboratory sessions will culminate in the construction of a multi-module robotic system that exemplifies methods introduced during this course."
02
Photos
This it the WPI RBE 3001 Board included with a Lab Kit. This board has an Atmel Embedded Processor that we will be programming in Eclipse with AVR Plugin. We'll also be using Subversion for collaboration and revision control.
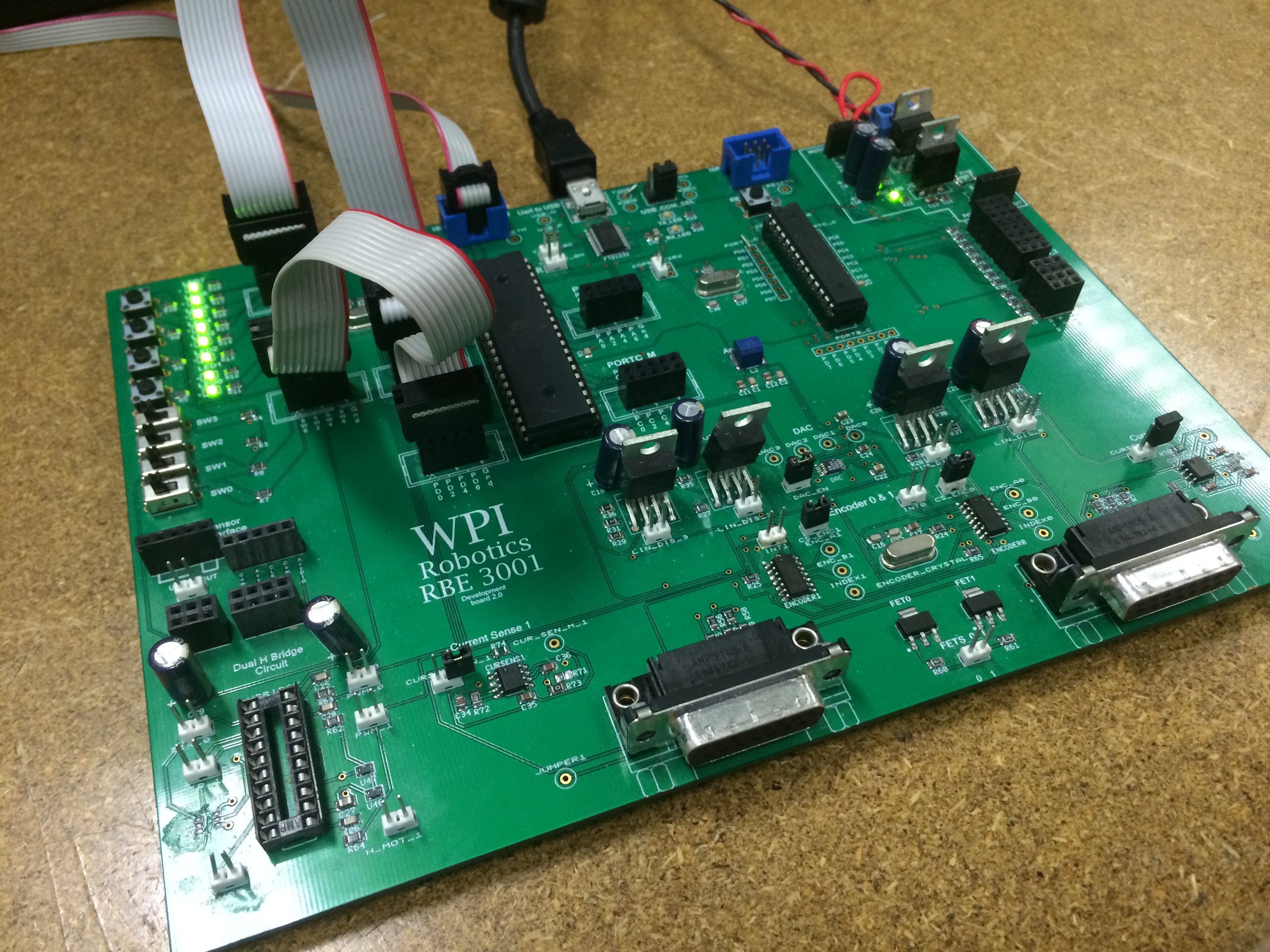
This it the WPI RBE 3001 Board included with a Lab Kit. This board has an Atmel Embedded Processor that we will be programming in Eclipse with AVR Plugin. We'll also be using Subversion for collaboration and revision control.
This is showing the Robot Arm wielding a new end effector temporarily to mount various Vex Robotic Metal Components.
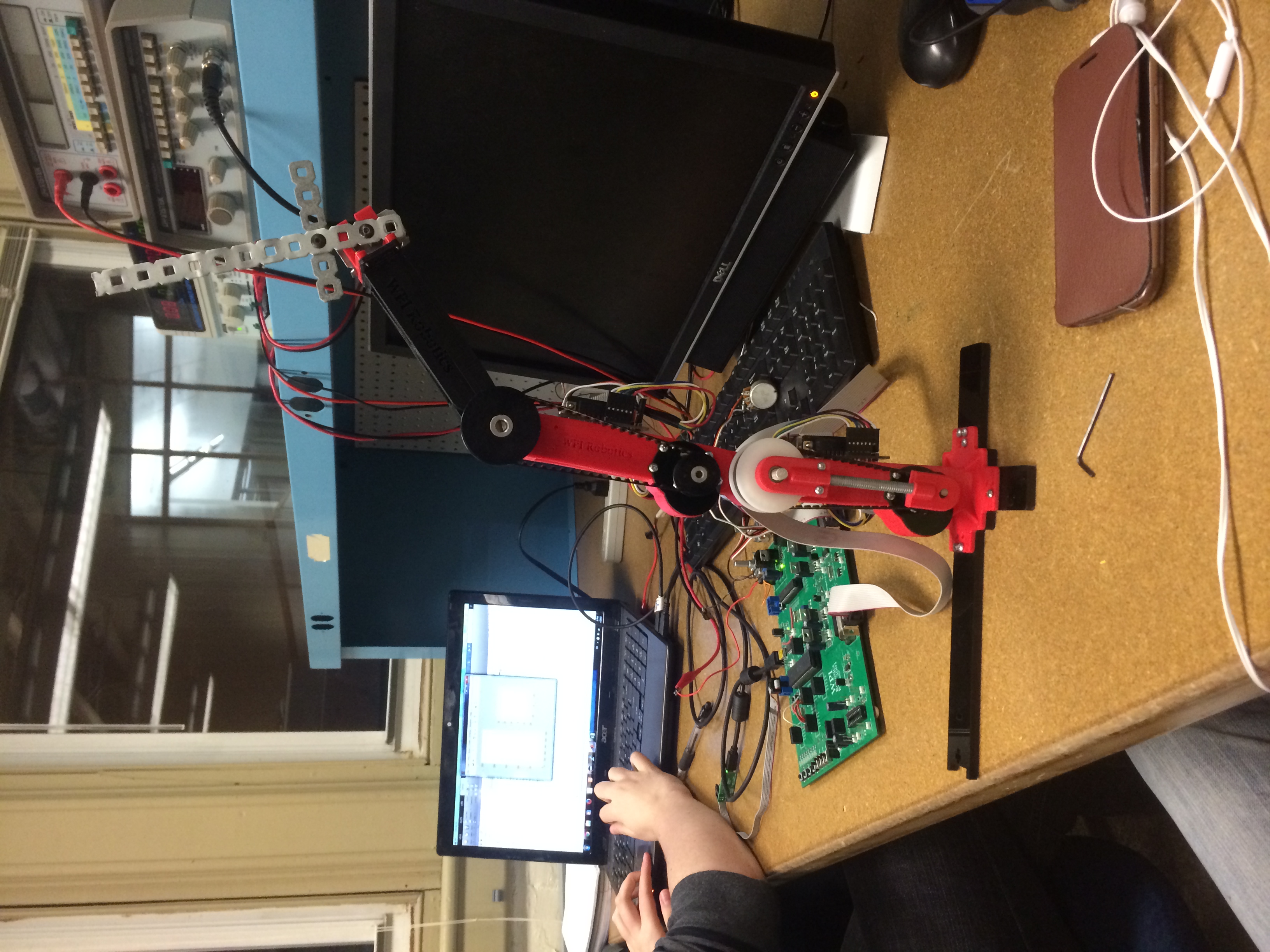
SThis is showing the Robot Arm wielding a new end effector temporarily to mount various Vex Robotic Metal Components.
At this phase of the lab, we were attempting to draw simple geometry with the robotic arm - such as triangles.
At this phase of the lab, we were attempting to draw simple geometry with the robotic arm - such as triangles.
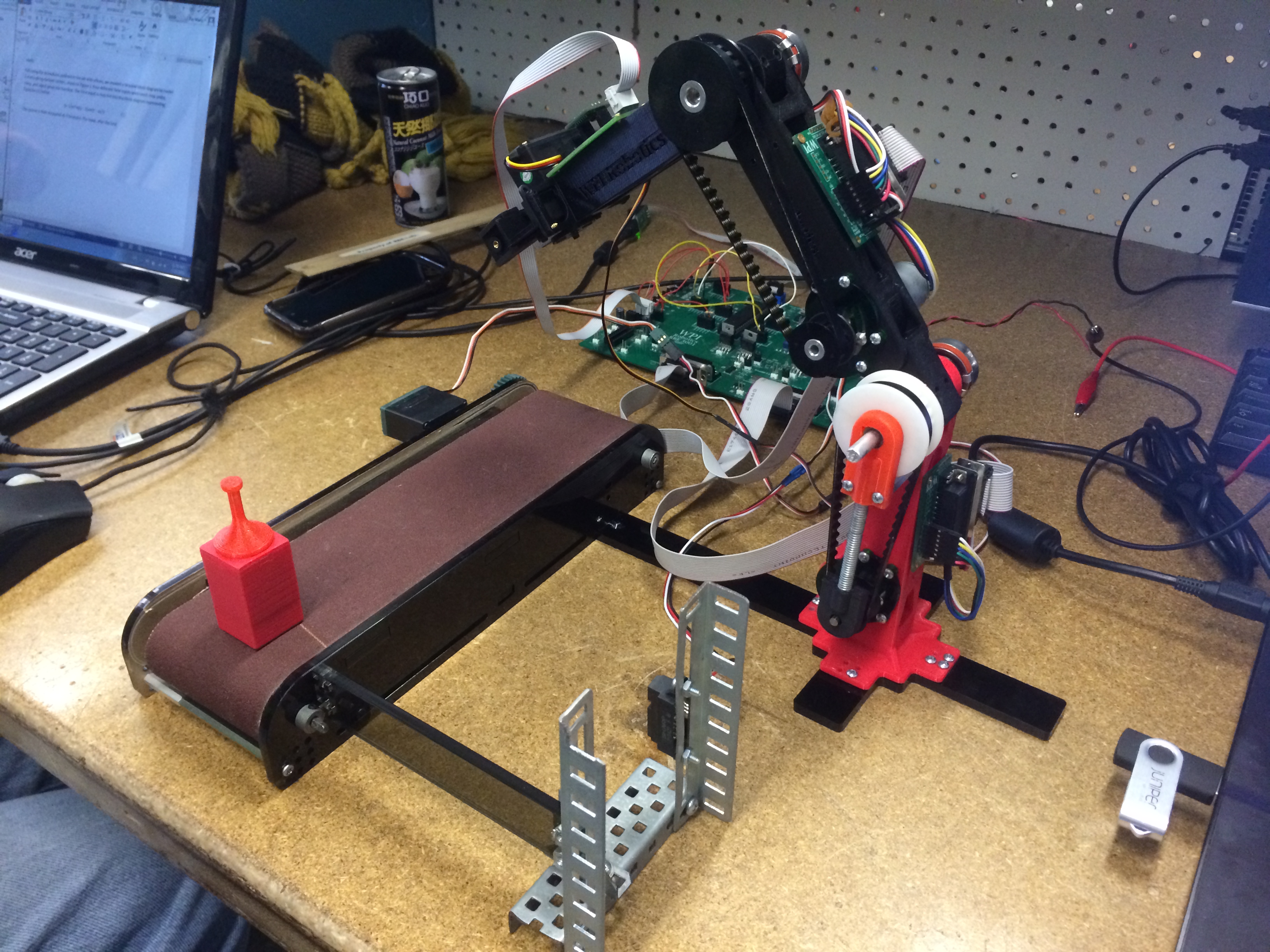
We introduced the sand-paper belt driven by the Vex Motor. This will carry objects with different mass down the conveyor to the robotic arm to manipulate.
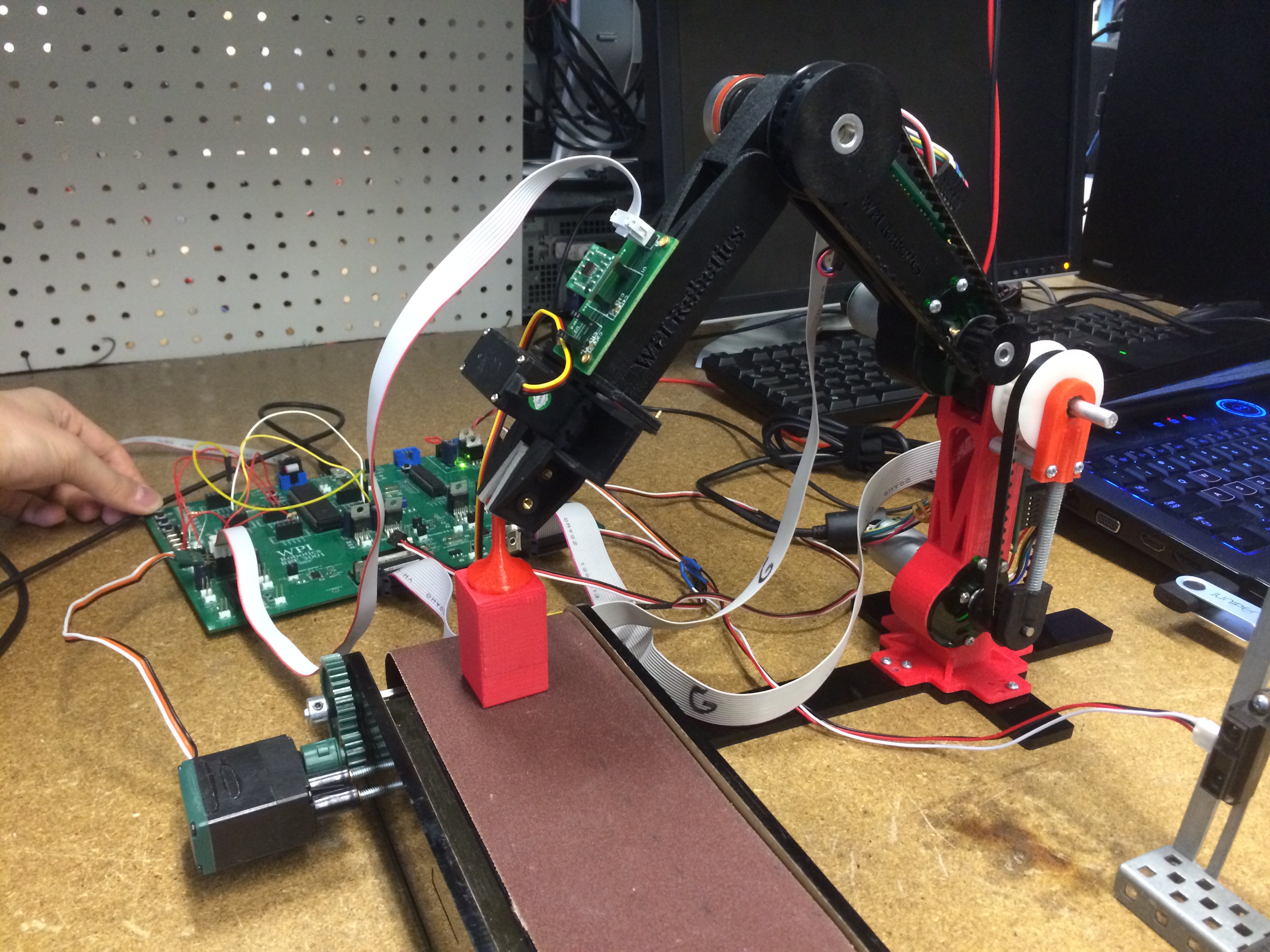
We introduced the sand-paper belt driven by the Vex Motor. This will carry objects with different mass down the conveyor to the robotic arm to manipulate.
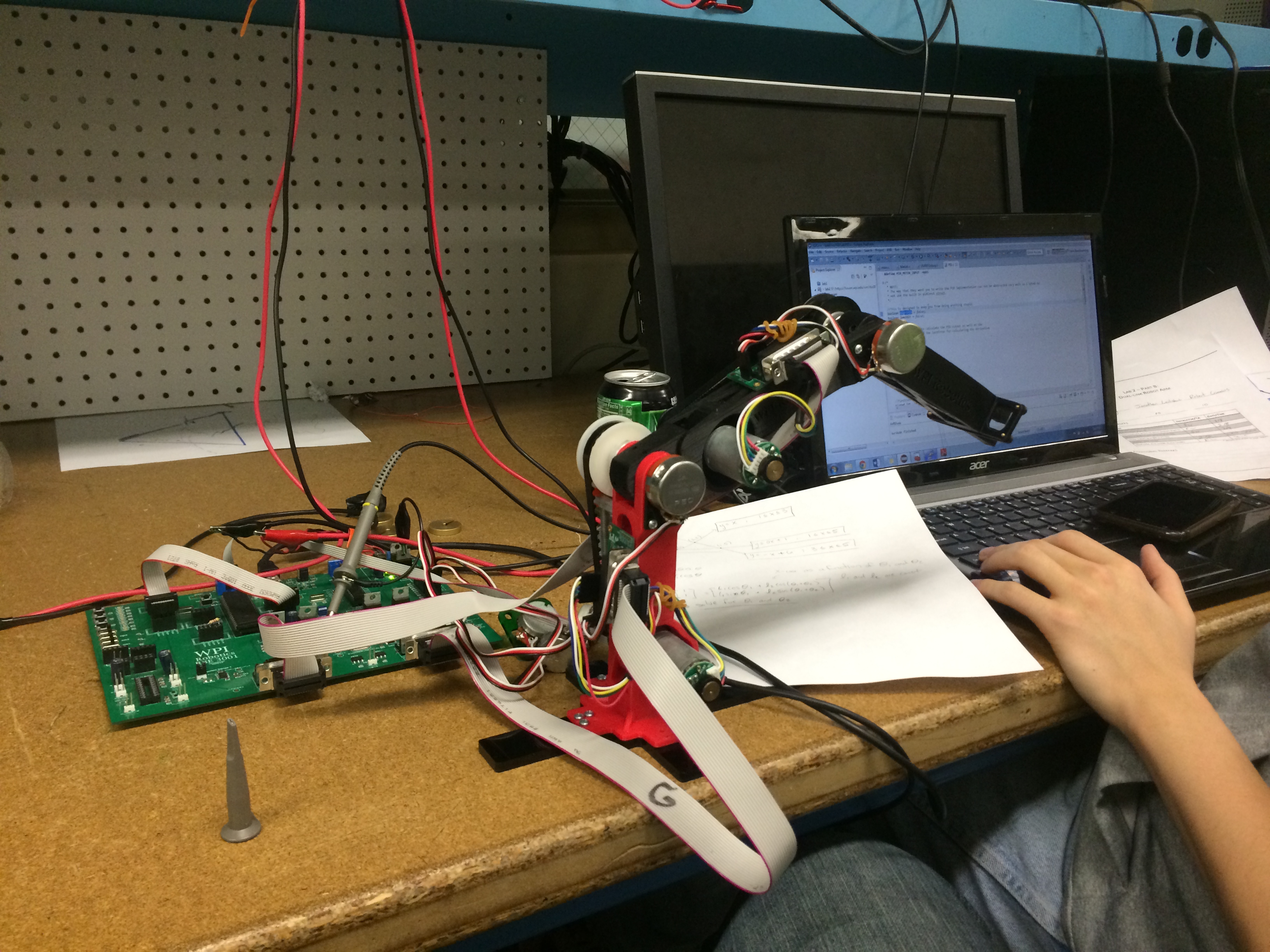
Here the Infrared Parallax Sensor is introduced, which will determine speed and position of the block.
Here the Infrared Parallax Sensor is introduced, which will determine speed and position of the block.
A Front-profile of the Conveyor, Sensor, and robot Arm System.
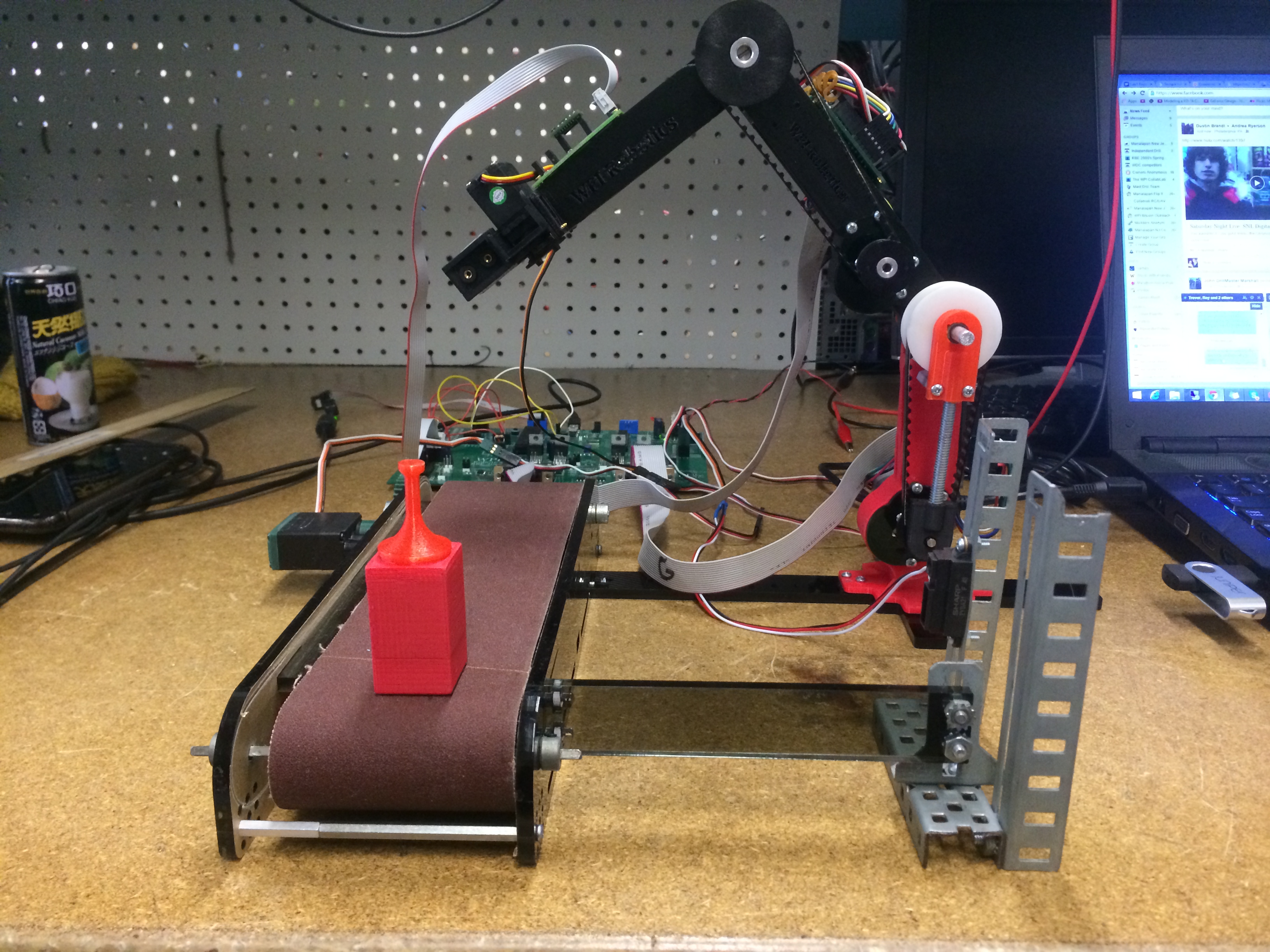
A Front-profile of the Conveyor, Sensor, and robot Arm System.
An isometric profile of the Robot Conveyor belt system.
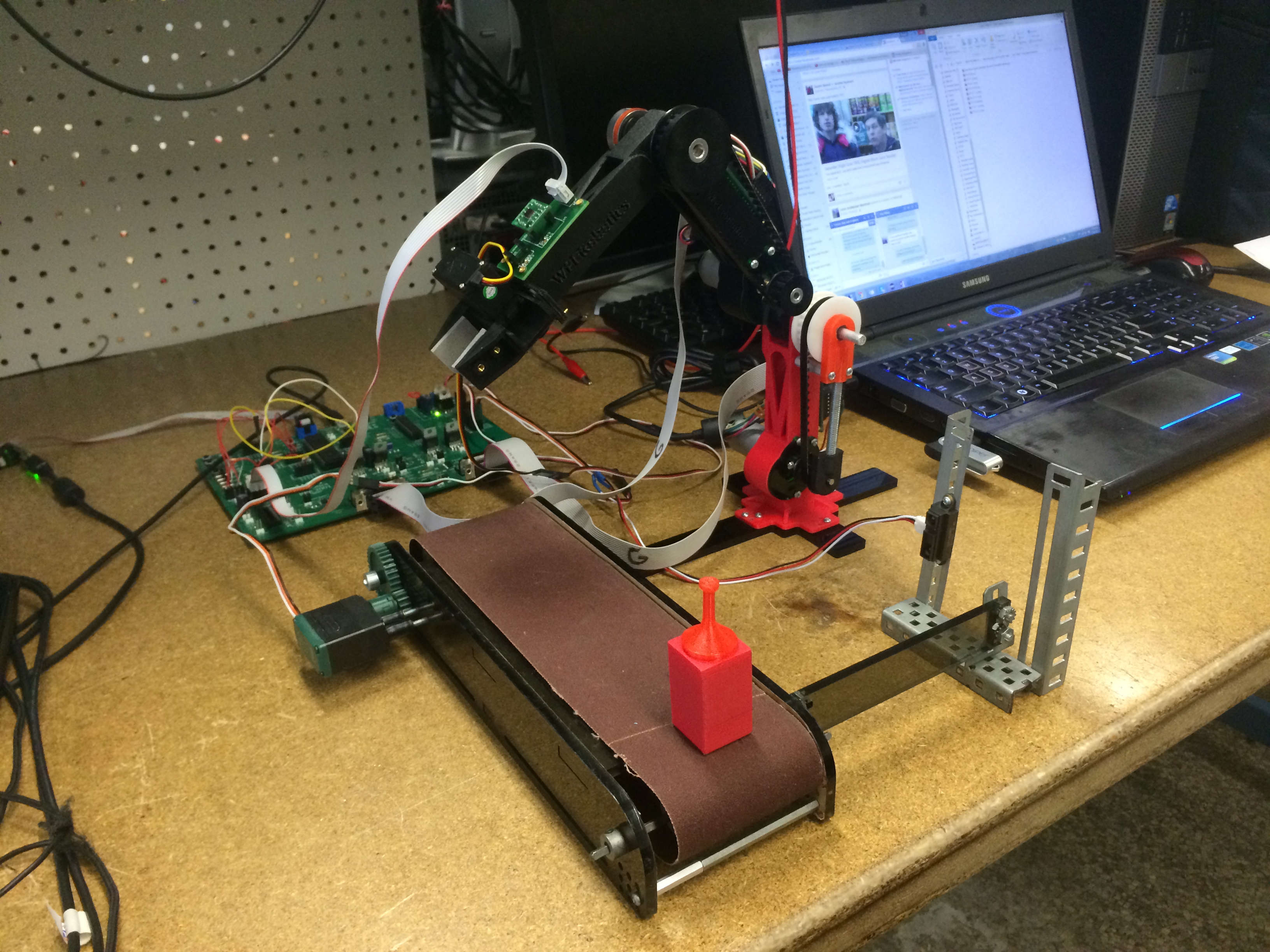
An isometric profile of the Robot Conveyor belt system.
Front-facing profile of the system.
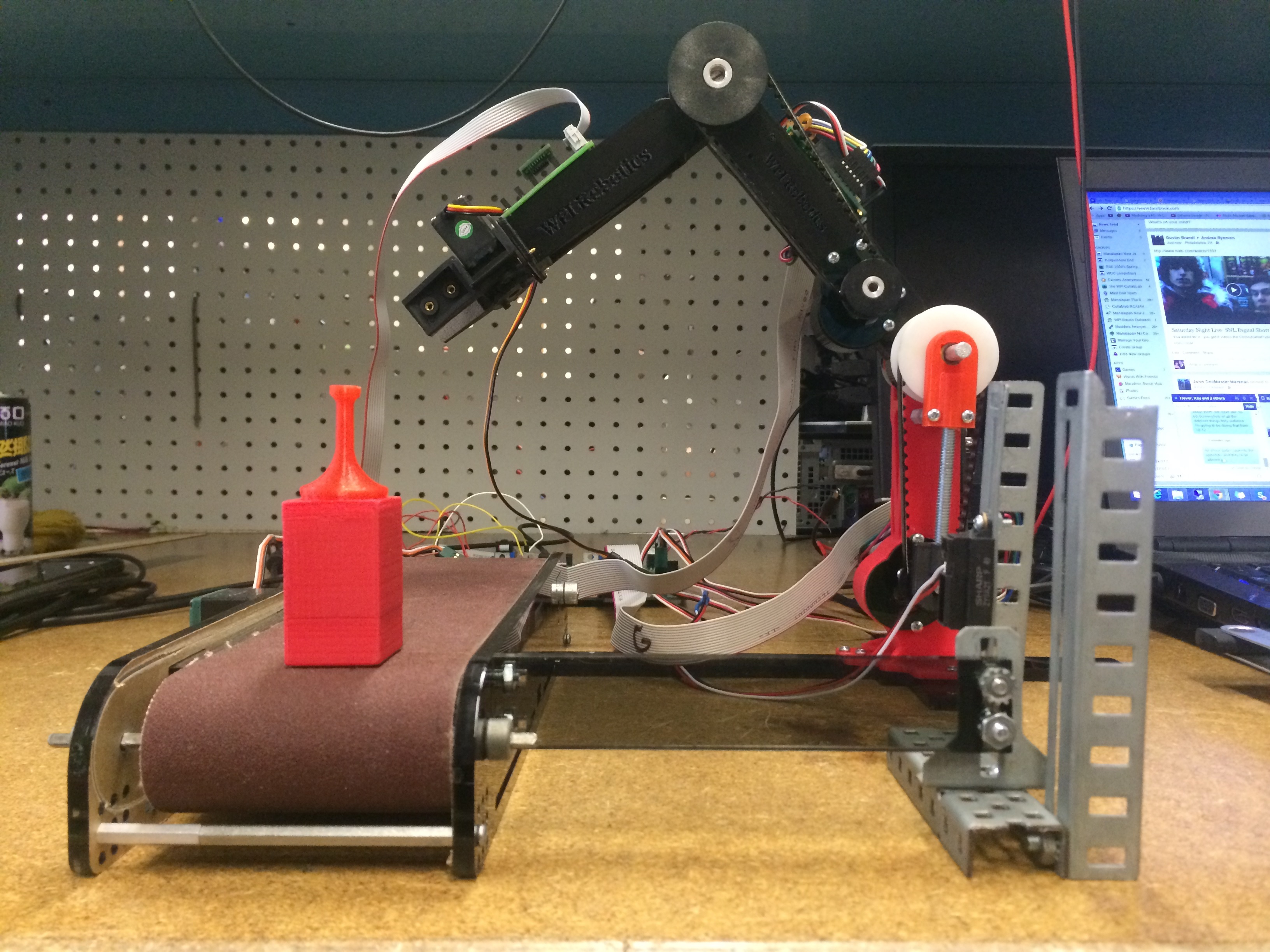
Front-facing profile of the system.